Architecture
Due to the requirements for flexibility and scalability, TbLink RPC uses a layered architecture. It’s reasonable to think of this layered architecture as being similar to a network stack.
Concept Model
Let’s start with some key concepts that are used across the document. There is implementation behind these concepts, but it’s useful to understand their purpose at a high level before diving into the details.
Environments and Endpoints
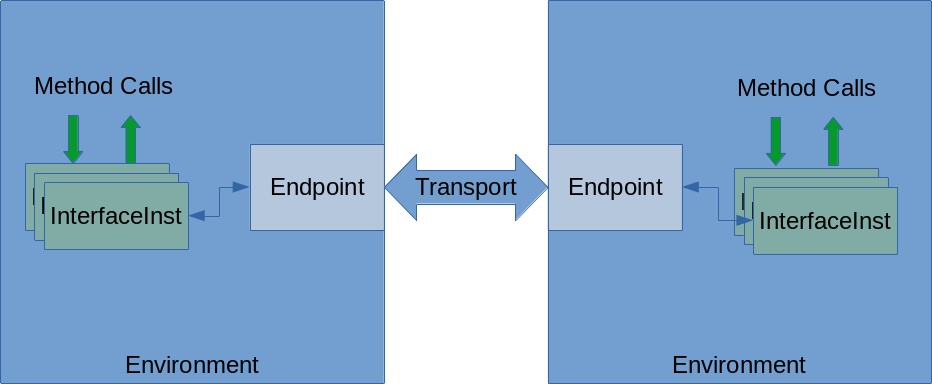
TbLink RPC exists to allow simulation-centric environments to communicate. Each pair of communicating environments has a pair of connected endpoints. An environment may communicate with multiple other environments, but each pair of connected environments may only be connected by a single pair of TbLink RPC endpoints.
One result of TbLink RPC being simulation-centric is the requirement to synchronize and control time. For example, when one environment is a simulator and the other is a testbench, it is critical to ensure that the simulation advances only once the testbench has responded to all pending simulation events. If this requirement isn’t met, our ability to properly interact with the design under test (DUT) will be impaired.
TbLink RPC is not a simulator co-simulation framework, with support for synchronizing the operation of multiple simulators each with their own notion of time. Consequently, one environment is considered the Timebase Provider. The Timebase Provider environment maintains the current time for all environments, and provides support for time-based callbacks.
Note
TbLink RPC doesn’t enforce the restriction on having only a single Timebase Provider. This restriction is simply a pragmatic one, given the implementation of capabilities of most simultors today.
Methods, Interfaces, and Interface Types
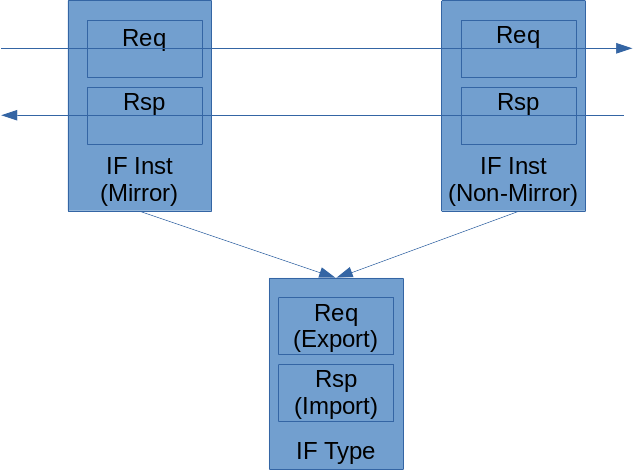
TbLink RPC environments communicate via method calls. Method calls are made with respect to interface instances. Each interface instance has an interface type, which captures which methods are available.
An interface type specifies type and usage information about methods. Specifically, it captures:
The return type of the method
Method parameter names and types
Whether the method is time-consuming
Whether the method is an export or an import.
This last bit – export vs import – is of critical importance. An imported method is called by the environment, while an exported method is implemented by the environment and called by TbLink RPC in response to a call from the peer environment.
Both connected interface instances have the same interface type. However, one is designated a mirror interface. A mirror interface implements the “mirror” of methods, so an export method is implemented as an import on a mirror interface, and an import method is implemented as an export.
Note
The terminology of import, export, and mirror comes from the vocabulary of Transaction-Level Modeling and IP-XACT IP encapsulation.
When defining an interface type, whether a method itself is an import or an export is entirely irrelevant. For example, the interface type above could have been defined with Req being an import and Rsp being an export. The practical impact of this decision would be that the right-hand interface instance would need to be specified as a mirror and the left-hand interface instance would need to be specified as a non-mirror in order to preserve the caller/called relationship.
Methods may be denoted as either time-consuming or non-time-consuming. This is a critical distinction precisely because TbLink RPC is targeted at enabling communication with simulation environments. When non-time-consuming methods are called, TbLink RPC understands that time in the simulation environment must not advance. When time-consuming methods are called, TbLink RPC understands that it may be necessary for time in the simulation environment to advance before the method call is complete.
Implementation Model
Implementation of TbLink RPC is split into three major components:
User Facades
Core Implementation
Environment Integration
As the name suggests, the user facade is the primary aspect of interest to end users.
The implementation core is primarily of interest to developers wishing to extend TbLink RPC to support another front-end language and/or simulator integration. Core Implementation must support all user facades and environment integrations.
Environment integration is responsible for handling environment-specific details. For example, propagating events properly in Verilog via the VPI API. Generally, environment integration is the smallest body of code in TbLink RPC.
User Facade
Every language and language methodology used for functional verification and with simulation models time and events in some form. In standard fashion, different languages and methodologies represent these same concepts in different ways. For example, SystemVerilog represents time-consuming methods as tasks and language constructs for modeling events, while Python represents the same concept using async methods and classes in the standard library.
The purpose of language- and methodology-specific facades is to adapt TbLink RPC to the appropriate language- and methodology-specific constructs.
The adaptation can go far beyond just adapting TbLink RPC to threading and event constructs supported by the target environment. For example, Python provides rich introspection and annotation capabilities that enable the user to capture meta-data for TbLink RPC directly in Python instead of in a separate side file.
import tblink_rpc
import ctypes
@tblink_rpc.iftype("rv_bfms.initiator")
class RvInitiatorBfm(object):
@tblink_rpc.exptask
async def req(self, data : ctypes.c_uint64):
pass
@tblink_rpc.impfunc
def rsp(self):
pass
The code snippet above shows interface-type information captured as annotations on the Python class that implements an interface instance. Other environments may have similar environment- or language-specific mechanisms that provide enhanced capabilities when TbLink RPC is used with that environment.
Core Implementation
The User Facade layer is characterized by differences. It’s goal is to provide the best user experience possible based on the target environment. In contrast, the Core Implementation layer is characterized by similarity. In nearly all cases, the Core Implementation layer for different languages and environments have identical APIs, or very nearly identical APIs.
In many cases, this similarity is very important because of cross-language reuse of the Core Implementation layer. For example, when a SystemVerilog is connected via a socket to an executable running as a separate process, the SystemVerilog Core Implementation layer uses the C++ Core Implementation layer to implement process management and socket communication.
With that, let’s dive into the key objects in the Core Implementation layer.
Environment Integration
Nearly every environment requires some amount of integration code to be able to access TbLink functionality. In many cases, this code exists to access the C++ implementation of TbLink. In the case of most simulation environments, some amount of code exists to trigger events in the simulation environment. The goal is for this environment-specific code to be as light-weight as possible.
Current environment integrations include:
SystemVerilog simulation (DPI)
Verilog simuilation (VPI)
Python (Cython/C++ binding)
Gateware for Silicon targets (byte-oriented interface)
Automation
A key aspect of the TbLink-RPC approach is automation to generate boilerplate implementation code from
Use-Cases / Application Examples
Here are a few examples of TbLink RPC applications.
Python-Driven UVM Sequence Execution
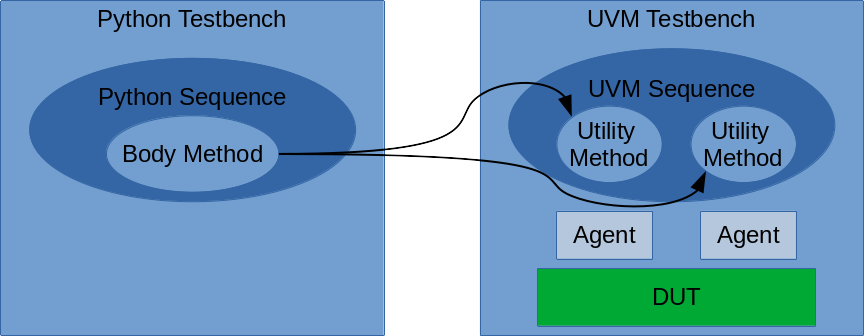
It is often attractive to use Python for capturing tests because of the flexibility and familiarity of the language, and because of access to Python libraries for algorithmic stimulus generation. However, an existing SystemVerilog/UVM testbench typically contains extensive infrastructure, such as bus functional models (BFMs) and/or verification IP (VIP), a register model, and utility sequences for performing standard operations on the design under test.
Leveraging all of this existing infrastructure is highly desirable. In order to do so, we effectively need some Python code to run in the context of the UVM virtual sequence running in the SystemVerilog environment.
The two key TbLink RPC capabilities exercised in this application example are:
Support for dynamically creating interface instances and passing them between environments.
Making multiple blocking calls between environments.
The key steps in this example are as follows:
The Python environment creates a TbLink RPC interface instance that corresponds to the UVM virtual sequence.
The Python environment passes this interface instance to a method in the SystemVerilog testbench environment, where handles to agents and register model are populated, and that starts the UVM sequence.
When the UVM testbench calls the sequence body task, the body task is invoked in the Python environment.
The Python body method can now drive behavior in the UVM testbench by calling utility methods in the virtual sequence.
UVM Sequence Implemented in Python
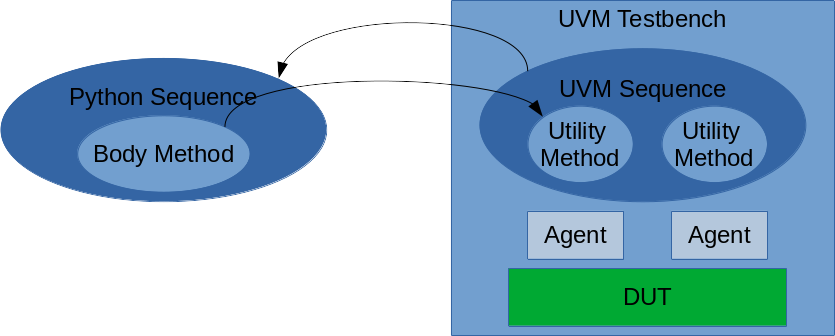
This usecase is somewhat the inverse of the previous usecase. In the previous example, the Python testbench created a sequence and executed it in the UVM testbench. In this example, the UVM testbench creates a sequence that is implemented in Python.
The key steps in this example are: - The UVM testbench creates a SystemVerilog sequence class that extends from a tblink-rpc implementation class - When the sequence is run, it starts an embedded Python interpreter and runs the specified
SystemVerilog Co-Simulation with C/C++ Software Behavior
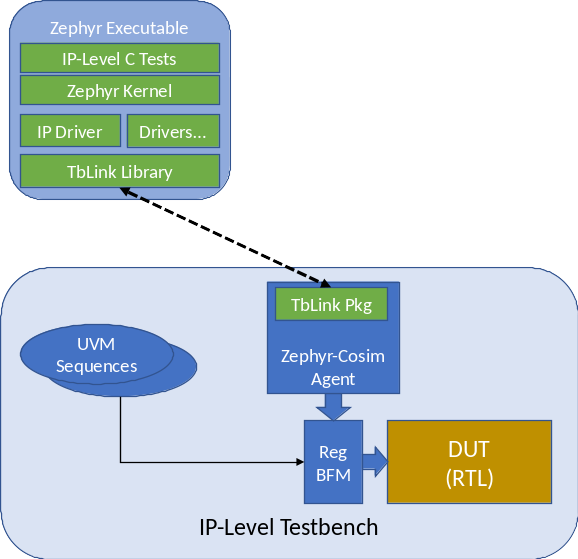
Bringing some aspects of software behavior into an IP-level environment enables firmware to be developed during the IP design and verification effort. One way of doing this is to native-compile the Zephyr RTOS real-time operating system and co-simulate its software behavior with the testbench and design. The Zephyr-Cosim project provides integration code and uses TbLink-RPC to connect a compiled Zephyr application to a simulation environment.
Python Driving a Silicon Platform
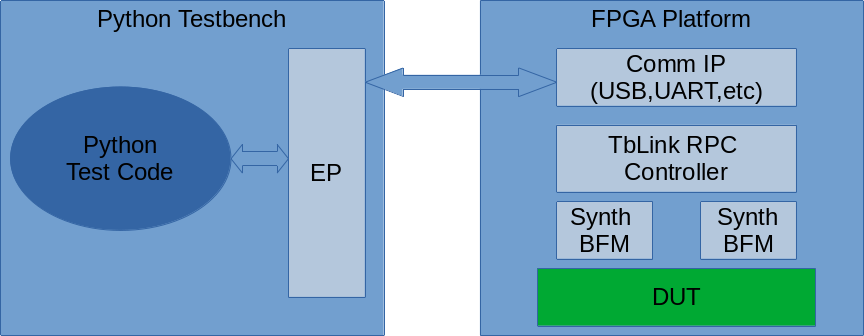
Validation efforts continue past simulation onto silicon platforms. It is highly beneficial to be able to leverage some aspects of the pre-silicon verification environment in the post-silicon world. A combination of TbLink-RPC, interface code generation, and BFMs/transactors enable a carefully-selected subset of the verification environment to be reused from verification to validation.